Как просто и дёшево собрать квадрокоптер и чем быстрее перейти к видеосьёмке или серьёзным полётам?
Это описание содержит информацию, как я собирал коптер, и на какие грабли наступал, может быть использовано только для справки, но не обязывающее делать всё как сказано. Граблей на всех хватит, да и я всего год как этим занимаюсь, опыт новичка. Но именно как новичёк новичку и пишу. Что искал год назад, то и соберу воедино. Всегда рад помочь, пишите коментарии.
Подбираем и закупаем детали которые понадобятся для сборки.
Если вы сами хотите подобрать компоненты для своего коптера, в другой статье я опишу из чего можно выбрать и на что стоит обратить внимание, здесь описывается мой успешный вариант летательного аппарата.
Наиболее популярный и надёжный магазин деталей для летательных и не только аппаратов - магазин HobbyKing.
Лично я просто написал в HobbyKing Chat где запросил, какую конфигурацию мне могут предложить. Пришлось немного подкорректировать то, что предложили (я просил дешёвый вариант, и они предложили совсем дешёвый пульт и зарядку). Первые детали, что я покупал: Рама из стеклопластика и углеволокна. Сейчас я уже с ней летаю, но первые полёты были ужасными, падений не получалось избежать, из за неумения ни сконфигурировать ни летать, и аппарат падал. На раме ломались лучи, их склеивание или какие либо другие починки не помогали при следующих падениях. Рекомендую раму для начала собирать самому. Об этом ниже. Пульт весьма неплохой, но сейчас я уже покупал бы его новую модификацию. Эта версия имела модуль передатчика, который не имел функции контроля потери сигнала FailSafe. Из за этого один раз меня сильно взбудоражила, когда коптер сам по себе стал взлетать всё выше. Я за ним бежал пока видел хоть точку в небе. Нашёл случайно, после 2х часов поисков во дворе частного дома, в метре от джипа в 1км от места где я начал пускать. Сразу заказал новый модуль передатчика и приёмника. Моторы трёхфазные безконтактные. Подьёмная сила 850г, чего вполне хватает для подьёма 1.5кг квадрокоптера и весьма резво. Только покупать рекомендую сразу запасной. Не важно, какие моторы покупать, запасной не помешает, по глупости можно спалить моторчик и ждать 1.5месяца пока придёт замена. Регулятор скорости моторов (ESC). Устройство, которое должно подходить под выбранные моторы. Опять же стоит покупать запасные.Эти уже вышли из продажи и рекомендую другие: Afro 30 они уже настроены для коптеров. Аккумулятор 2200мА/ч. Вполне хватает для 5-7мин полёта. Первое время рекомендую взять 2 или 3шт. В поле зарядить не получится. Большее количество А/ч не рекомендую, первые полёты заканчиваются либо падением и не длятся 5-7мин, либо дрожащими руками и впрыском адреналина уже через 5мин и не требуют продолжения полёта до успокоения. Пропеллеры пластиковые 10х4.5 подобраны под двигатели. Левосторонние и правосторонние (CW и CCW) Рекомендую покпуать много, Это расходный материал при полётах. Падение может переломать от 0 до 2х пропеллеров за раз. Замена быстрый процесс, и продолжение полёта. У меня каких 5 наборов по 4 пропеллера. Стоит преобрести разноцветные. Основная проблема при управлении это определить где у него перед, и пропеллеры помогают. Фишки для подключения аккумуляторов и ESC. всё равно пригодится, и не стоит больших денег. Распределительная плата. Не обязательна, но удобна. Можно реализовать такое посредством проводов и фишек для аккумуляторов. Коннекторы ESC и Моторов. Таких рекомендую взять даже пару пакетиков. Они подходят под Фишки аккумуляторов, по этому мого где можно использовать. Форма позволяет сохранять сигнал без потери мощность, а мотор требует до 30А в некоторых моментах (именно Ампер, не мили или микро и именно 20-30 :)) Кабеля для коммутации процессора и модуля приёмника. Тоже потом потребуется больше, но я уже их собираю от старых компьютеров или бывают в комплекте с другими устройствами. Индикатор заряда батареи. Очень полезная штука на первое время. Ставится в отдельное гнездо аккумулятора и контролирует заряд аккумулятора. Когда заряд падает до опасного, то пищит так, что из за 200м будет слышно.
Зарядка / балансировщик аккумуляторов. Весьма неплохая модель, умная и могу порекомендовать именно такого уровня брать, на будущее всё равно надо будет аккумуляторы заряжать. Простой у меня был, сдох после 20зарядок.
Центральный контроллер. Самя важная вещь, но какой подобрать - вопрос сложный. Позже расскажу между чем можно выбирать. Я для начала взял тот, что имеет много датчиков, и может быть перепрограммирован. Но программирование не супер простой но и не сложный процесс. Конфигурирование заключается в активации закомментированных строк в коде программы. Этот контроллер у меня всё ещё в опытных стадиях, а реально подходящий и доставивший мне удовольствие контроллер Naza M Light. Новичкам очень рекомендую, цена немного кусается, но если требуется без заморочек начать летать - это оно.
Покупаем дешёвый квадролёт для параллельного обучения.
Детали будут идти порядка месяца или больше, сборка займёт не мало времени, пока станет понятно что и как работает, до этого рекомендую преобрести маленький коптер для само обучения. У меня был Hubsan x4 и таскал я его почти везде, за зиму, когда не получалось летать на улице, летал в офисе, пытаясь пролетать под столами и стульями. Когда это получилось и стабильно, мои падения большой модели уменьшились на несколько порядков.
Когда начнут приходить детали, можно собирать раму. Как я уже говорил, раму лучше собрать самому, а не покупать готовую. Но это в другой статье.
Если вы купили готовую раму по моему списку, то у вас не составит её собрать.
Поставить моторчики и плату контроллера по центру.
ОЧЕНЬ РЕКОМЕНДУЮ НЕ ПОДКЛЮЧАТЬ ПИТАНИЕ ПОКА НЕ УБЕДИТЕСЬ ЧТО ВСЕ ПРАВИЛЬНО ПОДКЛЮЧЕНО.
Конечно так не выйдет, и захочется подключить чего нибудь сразу. :)
Без проблем, я сам так делаю.
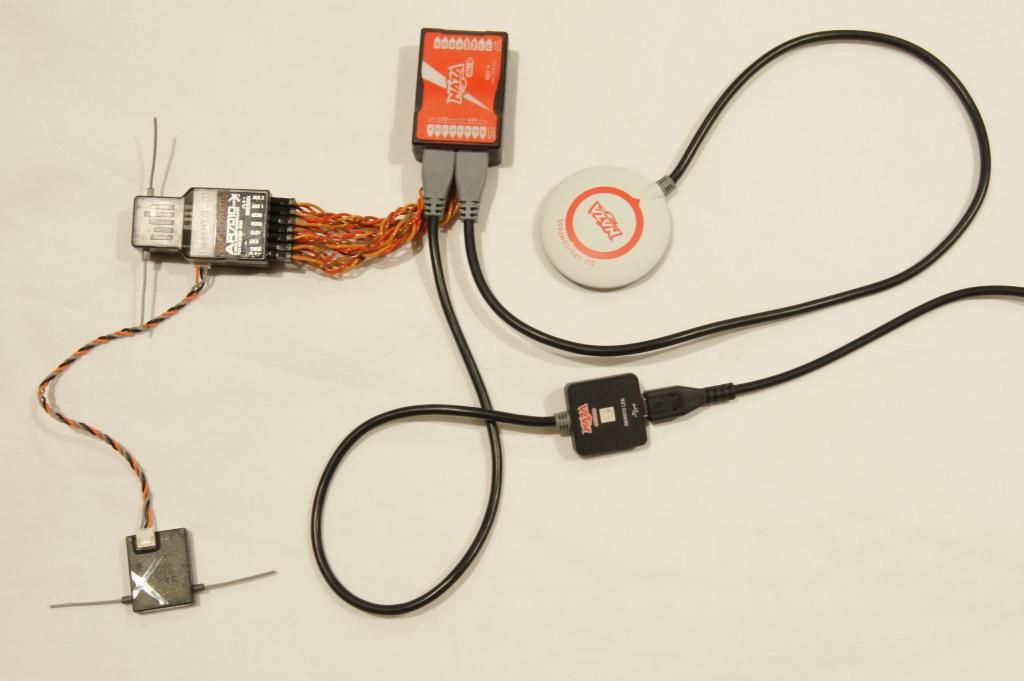
Проверяем оборудование: Вы купили NAZA M LIGHT (поздравляю, хороший выбор). подключите к центральному модулю модуль питания и можно GPS. Примерно как на картинке.
В модуль питания подключаем USB кабель и соединяем с компьютером. Из интернета качаем софт для работы с контроллером. Подключаем батарею, которую получили или любой блок питания на 12v. Красный провод +, чёрный всегда -.
Лампочка заморгала, значит живой :). Запускаем Assistant Software, появляется заставка
Если драйверы заинсталировались, то после заставки запустится окно управления установками. Если нет, проверьте драйверы и подключение. SKIP отменяет проверку работы драйвера, но не поможет с подключением. Можно поиграть с параметрами и поразбираться что где. Не рекомендую сразу что то менять, NAZA работает не плохо с заводскими параметрами.
Вы купили MultiWii Pro 2.0. Ура,ничего подключать кроме USB не требуется для занимательной проверки. Подключаем, и качаем софт.....
Реально есть несколько версий софта для MultiWii, оригинальный, доработанный сторонними программистами (MahoWii, BradWii). Это софт, который записывается в контроллер. При покупке у вас будет оригинальный MultiWii. Для работы с ним потребуется MultiWii GUI или WinGUI, Подключив плату через USB кабель, у вас должен появиться виртуальный COM порт, через который и будет подключаться программа GUI. Пробуем, экспериментируем, читаем детальное описание дальше.
Подключаем приёмник. Вставляем модуль передатчика в пульт. ОБЯЗАТЕЛЬНО ПОДКЛЮЧИТЬ АНТЕННУ. Без антенны может сгореть модуль передатчика.
Берём соединительный кабель на 3 проводка и подключаем его так, чтобы коричневый провод был "-" в модуле передатчика и контроллере. В передатчике втыкаем его в 1 канал, в контроллере в А0(MultiWii) или A(NAZA). Подключаем только один кабель!(Этого хватит, чтобы избежать лишних ошибок и проверить функциональность.
К стати, момент, который я как новичёк очень долго выяснял:
THROTTLE - POWER - газ, управление по вертикали. Рычаг на пульте слева, перемещение вперёд/назад.
RUDDER-YAW вращение вокруг вертикальной оси. Рычаг на пульте слева, лево/право.
AELERON - ROLL - вращение вдоль оси полёта, короче движение влево/вправо. На пульте рычаг справа, вправо/влево.
ELEVATOR - PITCH - вращение вперёд/назад. Рычаг справа, вперёд/назад.
Положение рычагов на пульте указано для типа пульта MODE2.
Включаем сначала пульт, потом USB на контроллере. Смотрим через программу область приёмника. Подвигайте все ручки, должен начать двигаться ползунок на одном из каналов контроллера. Если получилось, уже пол дела есть. Далее будет сложнее. Можно попробовать подключить по одному скедующему каналу приёмника к контроллеру и посмотреть что срабатывает. Для конфигурирования всех каналов возможно придётся помучаться, но это уже позже.
Пробуем работу моторов. ВНИМАНИЕ, забыв подключить ESC к мотору и подав на него питание гарантированно сгорание ESC. (Если только он не имеет зашиты, но это на дорогих моделях). Ну и не додумайтесь поставить пропеллер!!!
Подключаем по схеме, можно подключить к тому порту приёмника, который уже нашли как управляется. Порядок подключения проворов между ESC и Мотором неважен. Поменяв 2 провода местами, просто мотор будет крутиться в другую сторону. Не делайте этого при включённом ESC !!! (имею горсть таких по ошибке отключённых сгоревших ESC). На Передатчике устанавливаем рычаг подключённого канала на минимум, и подключаем батарею к ESC. Пропищит музыка, сообщающая что ESC готов. Интересный факт, что пищать будет мотор. Медленно измените положение рычага, мотор должен начать крутиться. Держать мотор надо за его нижнюю часть, вращается вся верхняя. Если всё получилось проверяем, сколько осталось не сгоревших ESC и моторов, если их хватает для сборки всего аппарата, то можно начать монтировать на раму.
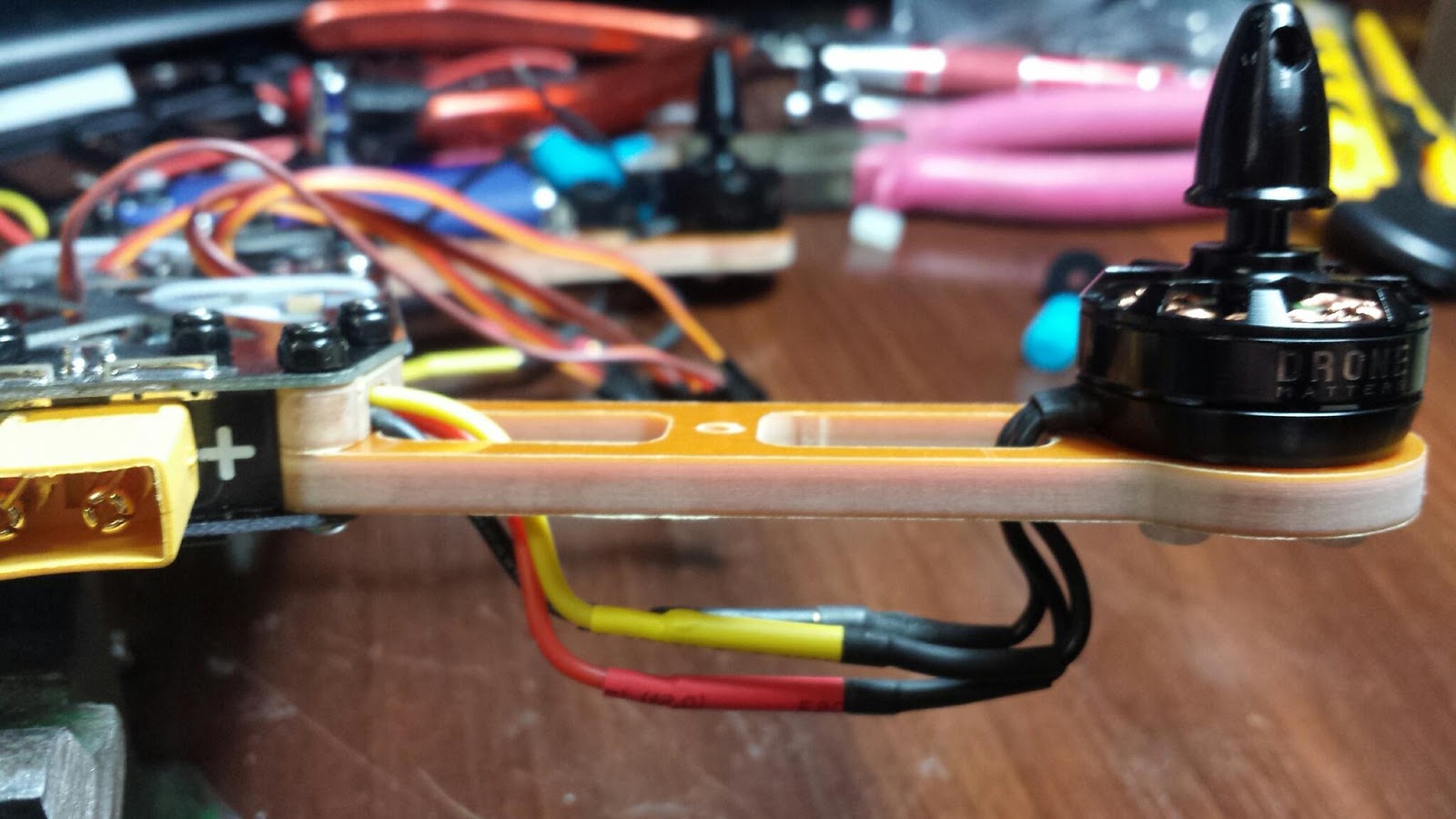
Подключение на раме. Устанавливаем всё оборудование кому как нравится. Рекомендации: а. GPS Антенну NAZA ставить проводом вперёд по движению аппарата! б. Усы FrSky модуля приёмника, если у вас такой, расположить под 90 градусов друг к другу. Сама антенна усов это на самом конце уса, оголённая часть. в. Для MultiWii платы желательно предусмотреть гашение вибраций, поставить на поролоновую, резиновую или какую другую мягкую поверхность. В интернете предлагают разные способы решения. NAZA имеет встроенное гашение вибраций.
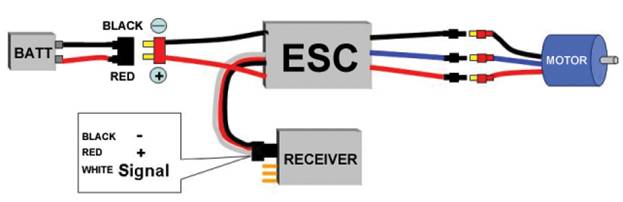
Подключаем все ESC к моторам, порядок фазовых проводов пока не важен. Пропеллеров не ставим! Питание всех ESC идёт прямо на батарею через распределительную плату или своё решение. Хвосты управления ESC подключаем по схеме:
Для MultiWii:
Для NAZA:
Не забываем, что коричневый провод это "-", красный "+", белый "Signal".
В интернете есть рекомендации отключать красный провод, но для начала это не обязательно.
Теперь надо разобраться с приёмником. У меня не мало ушло времени понять как управляются сигналы на Turnigy 9X, с Turnigy 9XR проще.9X Рассчитан не на коптеры и лучше всего его перепрошить, но процесс этот сложный, требует пайки и знаний как прошивать, да и чем. 9XR сразу умеет настраивать каждый канал по отдельности. Я свой перепрошивал, и всё стало проще но может начинающему поможет такой фильмик:
Итак. Предположим, что у вас получилось подключить приёмник к контроллеру, контроллер к ESC и ESC к мотору. Так вы собрали весь квадрокоптер. Надо пробовать запуск двигателей с пульта.
Не ставьте пропеллеры!!! Вообще их пока уберите и не доставайте пока не перейдём к запуску пробного полёта.
NAZA запускается опустив на пульте оба рычага вниз и к центру. Так же выключается.
MultiWii надо сконфигурировать переключатель, какой вам удобнее на запуск двигателей ARM.
Выполнив запуск двигатели начнут крутиться в направлениях которые легко проверить приложив палец к боку моторчика. Проверив направления, чтобы соответствовало рисунку, снимите питание с коптера. Поменяйте две любых фазы (провода подключения между мотором и регулятором) для изменения направления. Проверяем направления, если всё правильно переходим к калибровке сенсоров.
Калибровка акселерометра активируется через компьютер. Установите коптер по возможности чем горизонтальнее, подключите USB кабель.
Для NAZA. Подключите батарею. Запустите Assistant. Когда устройство соединится перейдите в окно на рисунке.
нажмите кнопку ...... ждите 1 минуту, пока производиься калибровка.
Для MultiWii. Запустите программу WinGUI. Выберите COM порт, под которым должен был определиться контроллер. Если этого не произошло, придётся помучаться и найти драйверы и решение в интернете.
Нажмите кнопку READ, на экране должны начать появляться графики и измениться параметры. Нажимаем на кнопку калибровки и ждём 30 сек, наблюдая как выравнивается линия горизонта.
Калибровка компаса.
Для NAZA. Если есть GPS, то в нём есть и компас. Обязательно поставьте GPS проводом в направлении полёта, не в сторону хвоста. Для меня это было не очевидно и месяц падений. Сконфигурируйте переключатели на приёмнике для переключения между режимами полёта Man/Att/Gps. Отключите коптер от компьютера и перегрузите отключив и подключив батарею. 10 раз быстро переключите между режимами Man и Gps. Индикатор начнёт гореть жёлтым. Поднимите коптер в руках и поворачивайтесь вокруг своей оси, пока индикатор не станет зелёным (один разворот 360°). Поверните коптер на 90° по направлению движения и снова повернитесь на 360°. Эта инструкция есть в описании FC Naza. Можно поворачиваться самому, можно крутить коптер.
Для MultiWii.
Через WinGUI нажмите кнопку CallMag. У вас есть 1минута, чтобы развернуть коптер вокруг каждой из 3 осей.
Испытания на столе.
Моя первая ошибка была поставив пропеллеры и попробовав как оно всё завелось, аккуратно выключить пульт. Копьтер на всех газах сделал 4 дырки от наконечников винтов в гипсокартонном потолке и чудом миновав новый телик рухнул на пол. ПУЛЬТ ВКЛЮЧАЕТСЯ ПЕРВЫМ И ВЫКЛЮЧАЕТСЯ ПОСЛЕДНИМ!!!
Я сделал стенд для проверки дома. Всё просто. 2 параллельных палки на полу, или на столе укладываются так, чтобы на них и только на них, укладывался коптер. Их надо хорошо закрепить, я струбцинами прикрутил к стульям на которых положил. Далее сделал из проволоки 4 кольца 10см диаметра, таких, чтобы легко можно было одеть на лучи коптера и палки одновременно, но и оставалась свобода для взлёта на 5-8см. Вдоль палок коптер двигался. Когда вся конструкция собрана, разгоняем домашних и прячим их от возможных при испытаниях отлетаний деталей, например лопнувшего пропеллера.
Испытание взлёта.
Устанавливаем собранный коптер на стенд, закрепляем винты.
Включаем пульт, рычаги в среднем положении, газ вниз. подключаем батарею, дожидаемся инициализации. Включаем ARM. Для NAZA на 5% увеличиваем газ.
Пропеллеры вращаются, сердцебиение участилось. Переключаем в режим ATTI NAZA, HORIZON MultiWii. Чрезвычайно медленно увеличиваем газ. Как только начнёт ехать, сразу снимаем газ.
Если при увеличении газа коптер резко включает газ отдельным моторам, значит плохо откалиброван акселерометр. Перекалибруйте.
Если взлёт получается, но коптер носит в стороны, всё в порядке, дома вихри от пропеллеров и будут его сносить.
Коптер должен набирать скорость винтов равномерно на всех, пытаясь выровняться по горизонтали. Если этого не происходит и коптер пытается перевернуться, проверьте правильность направления вращения винтов и их подключение к FC.
Если взлёт более или менее получается и его можно контролировать рычагом направления вперёд/назад,влево/вправо, можно идти на улицу.
Испытание на улице.
Ждём погоду без ветра и осадков, ветер слабый не мешает, но средний для испытаний не годится, хотя летать при нём реально. Ищем место безлюдное, провода и здания не ближе 500м. Лучше в поле.
NAZA с GPS включаем режим GPS и ждём когда LED промигается до зелёного. Моргание красный/зелёный краснам показывает, сколько спутников не хватает для стабильного полёта.
MultiWii ставим режим HORIZON/BARO.
Управляем газом, направлением и разворотом чем медленнее. Взлетаем не выше 3метров. При испытаниях не раз он у меня вдруг решал пойти боком в землю, сам терял управление, отлетали, от вибрации открутившиеся детали или просто лопались винты. Чтобы избежать сильных поломок при радении испытываем низко и медленно.
Поздравляю с первым взлётом, и если повезёт, посадкой.
Crash нормальное явление и не надо переживать, надо делать удароустойчивую модель с быстрой ремонтопригодностью.
У меня были недели, когда я из 10 взлётов садился 1, остальные 9 шёл домой чинить.
Самый короткий полёт - 1сек. Столько потребовалось коптеру чтобы выровнять линию горизонта некалибровонного акселерометра. Он просто перевернулся на
месте взлёта.
Доработки до видео.
Для начала рекомендую камеру которую не жалко. Замечательно подходит китайский брелок с камерой. Его можно просто приклеить на двустороннюю липкую ленту.
Для HD с планами на будущее можно купить не очень дорогую Mobius.
Ну, и лучший на 2014 г вариант - GoPro Hero3.
Думаю логично с начала почуствовать как оно летает и только после стабильного полёта ставить дорогую камеру.
Gimbal - штатив для камеры, выдерживающий горизонтальное положение камеры, очень хрупкий и планируйте ставить после действительно стабильного полёта.
Планы на будущее.
FPV First Person View - камера с передатчиком на коптере и очки или экран с приёмником у пилота. Управлять становится интереснее, но не проще.
6ти или 8ми винтовые модели при поломке одного двигателя имеют возможность продолжить полёт, или удачно сесть. Кроме того их грузоподъёмность выше.
Интересно как оно работает, хочу постепенно собрать дрон с кучей возможностей.































.jpg)